◆ AccessMode
used by SharedLoadSaveThread only
| Enumerator |
|---|
| AccessModeRead | image will only be used for reading
|
| AccessModeReadWrite | image data will possibly be changed
|
◆ NotificationPolicy
| Enumerator |
|---|
| NotificationPolicyDirect | Always send notification, unless the last event is still in the event queue
|
| NotificationPolicyTimeLimited | Always wait for a certain amount of time after the last event sent. In particular, the first event will be sent only after waiting for this time span. (Or no event will be sent, when the loading has finished before) This is the default.
|
◆ State
| Enumerator |
|---|
| Inactive | |
| Scheduled | |
| Running | |
| Deactivating | |
◆ LoadSaveThread()
| Digikam::LoadSaveThread::LoadSaveThread |
( |
QObject *const |
parent = nullptr | ) |
|
|
explicit |
◆ ~LoadSaveThread()
| Digikam::LoadSaveThread::~LoadSaveThread |
( |
| ) |
|
|
override |
◆ exifOrientation()
| int Digikam::LoadSaveThread::exifOrientation |
( |
const QString & |
filePath, |
|
|
const DMetadata & |
metadata, |
|
|
bool |
isRaw, |
|
|
bool |
fromRawEmbeddedPreview |
|
) |
| |
|
static |
◆ finished
| void Digikam::DynamicThread::finished |
( |
| ) |
|
|
signalinherited |
◆ imageLoaded()
◆ imageSaved()
| void Digikam::LoadSaveThread::imageSaved |
( |
const QString & |
filePath, |
|
|
bool |
success |
|
) |
| |
|
overridevirtual |
◆ imageStartedLoading()
| void Digikam::LoadSaveThread::imageStartedLoading |
( |
const LoadingDescription & |
loadingDescription | ) |
|
|
overridevirtual |
◆ imageStartedSaving()
| void Digikam::LoadSaveThread::imageStartedSaving |
( |
const QString & |
filePath | ) |
|
|
overridevirtual |
◆ infoProvider()
◆ isFinished()
| bool Digikam::DynamicThread::isFinished |
( |
| ) |
const |
|
inherited |
◆ isRunning()
| bool Digikam::DynamicThread::isRunning |
( |
| ) |
const |
|
inherited |
◆ load()
◆ loadingProgress()
| void Digikam::LoadSaveThread::loadingProgress |
( |
const LoadingDescription & |
loadingDescription, |
|
|
float |
progress |
|
) |
| |
|
overridevirtual |
◆ moreCompleteLoadingAvailable()
◆ notificationReceived()
| void Digikam::LoadSaveThread::notificationReceived |
( |
| ) |
|
|
protected |
◆ priority()
| QThread::Priority Digikam::DynamicThread::priority |
( |
| ) |
const |
|
inherited |
◆ querySendNotifyEvent()
| bool Digikam::LoadSaveThread::querySendNotifyEvent |
( |
| ) |
const |
|
virtual |
◆ run()
| void Digikam::LoadSaveThread::run |
( |
| ) |
|
|
overrideprotectedvirtual |
◆ runningFlag()
| bool Digikam::DynamicThread::runningFlag |
( |
| ) |
const volatile |
|
protectedinherited |
◆ save()
| void Digikam::LoadSaveThread::save |
( |
const DImg & |
image, |
|
|
const QString & |
filePath, |
|
|
const QString & |
format |
|
) |
| |
◆ savingProgress()
| void Digikam::LoadSaveThread::savingProgress |
( |
const QString & |
filePath, |
|
|
float |
progress |
|
) |
| |
|
overridevirtual |
◆ setEmitSignals()
| void Digikam::DynamicThread::setEmitSignals |
( |
bool |
emitThem | ) |
|
|
inherited |
◆ setInfoProvider()
◆ setNotificationPolicy()
| void Digikam::LoadSaveThread::setNotificationPolicy |
( |
NotificationPolicy |
notificationPolicy | ) |
|
◆ setPriority()
| void Digikam::DynamicThread::setPriority |
( |
QThread::Priority |
priority | ) |
|
|
inherited |
◆ shutDown()
| void Digikam::DynamicThread::shutDown |
( |
| ) |
|
|
protectedinherited |
◆ signalImageLoaded
| void Digikam::LoadSaveThread::signalImageLoaded |
( |
const LoadingDescription & |
loadingDescription, |
|
|
const DImg & |
img |
|
) |
| |
|
signal |
◆ signalImageSaved
| void Digikam::LoadSaveThread::signalImageSaved |
( |
const QString & |
filePath, |
|
|
bool |
success |
|
) |
| |
|
signal |
◆ signalImageStartedLoading
| void Digikam::LoadSaveThread::signalImageStartedLoading |
( |
const LoadingDescription & |
loadingDescription | ) |
|
|
signal |
All signals are delivered to the thread from where the LoadSaveThread object has been created. This thread must use its event loop to get the signals. You must connect to these signals with Qt::AutoConnection (default) or Qt::QueuedConnection. This signal is emitted when the loading process begins.
Referenced by imageStartedLoading().
◆ signalImageStartedSaving
| void Digikam::LoadSaveThread::signalImageStartedSaving |
( |
const QString & |
filePath | ) |
|
|
signal |
◆ signalLoadingProgress
| void Digikam::LoadSaveThread::signalLoadingProgress |
( |
const LoadingDescription & |
loadingDescription, |
|
|
float |
progress |
|
) |
| |
|
signal |
This signal is emitted whenever new progress info is available and the notification policy allows emitting the signal. No progress info will be sent for preloaded images (ManagedLoadSaveThread).
Referenced by loadingProgress().
◆ signalMoreCompleteLoadingAvailable
This signal is emitted if
- you are doing shared loading (SharedLoadSaveThread)
- you started a loading operation with a LoadingDescription for a reduced version of the image
- another thread started a loading operation for a more complete version You may want to cancel the current operation and start with the given loadingDescription
Referenced by moreCompleteLoadingAvailable().
◆ signalSavingProgress
| void Digikam::LoadSaveThread::signalSavingProgress |
( |
const QString & |
filePath, |
|
|
float |
progress |
|
) |
| |
|
signal |
◆ signalThumbnailLoaded
| void Digikam::LoadSaveThread::signalThumbnailLoaded |
( |
const LoadingDescription & |
loadingDescription, |
|
|
const QImage & |
img |
|
) |
| |
|
signal |
◆ start [1/2]
| void Digikam::DynamicThread::start |
( |
| ) |
|
|
slotinherited |
Referenced by Digikam::ImageHistogram::calculateInThread(), Digikam::FacePreviewLoader::checkRestart(), Digikam::ImageHistogram::getCount(), Digikam::ImageHistogram::getMaximum(), Digikam::ImageHistogram::getMean(), Digikam::ImageHistogram::getMedian(), Digikam::ImageHistogram::getStdDev(), load(), Digikam::ManagedLoadSaveThread::load(), Digikam::ManagedLoadSaveThread::loadThumbnail(), Digikam::DImgThreadedFilter::multithreadedSteps(), Digikam::ManagedLoadSaveThread::preloadThumbnail(), Digikam::ManagedLoadSaveThread::preloadThumbnailGroup(), Digikam::ManagedLoadSaveThread::prependThumbnailGroup(), Digikam::ScanStateFilter::process(), save(), Digikam::ManagedLoadSaveThread::save(), and Digikam::DImgThreadedFilter::startFilter().
◆ start() [2/2]
| void Digikam::DynamicThread::start |
( |
QMutexLocker & |
locker | ) |
|
|
protectedinherited |
◆ starting
| void Digikam::DynamicThread::starting |
( |
| ) |
|
|
signalinherited |
Emitted if emitSignals is enabled
◆ state()
◆ stop [1/2]
| void Digikam::DynamicThread::stop |
( |
| ) |
|
|
slotinherited |
◆ stop() [2/2]
| void Digikam::DynamicThread::stop |
( |
QMutexLocker & |
locker | ) |
|
|
protectedinherited |
◆ taskHasFinished()
| void Digikam::LoadSaveThread::taskHasFinished |
( |
| ) |
|
|
virtual |
◆ threadMutex()
| QMutex * Digikam::DynamicThread::threadMutex |
( |
| ) |
const |
|
protectedinherited |
This is the non-recursive mutex used to protect state variables and waiting in this class. You can use it if you want to protect your memory in the same scope as calling start, stop or wait, then using the QMutexLocker variants below. Note that when you have locked this mutex, you must use these variants, as the mutex is non-recursive.
Referenced by Digikam::ScanStateFilter::dispatch(), load(), Digikam::ManagedLoadSaveThread::load(), Digikam::ManagedLoadSaveThread::loadThumbnail(), Digikam::ManagedLoadSaveThread::preloadThumbnail(), Digikam::ManagedLoadSaveThread::preloadThumbnailGroup(), Digikam::ManagedLoadSaveThread::prependThumbnailGroup(), Digikam::ScanStateFilter::process(), run(), Digikam::ScanStateFilter::run(), save(), Digikam::ManagedLoadSaveThread::save(), Digikam::ManagedLoadSaveThread::shutDown(), Digikam::ManagedLoadSaveThread::stopAllTasks(), Digikam::ManagedLoadSaveThread::stopLoading(), Digikam::ManagedLoadSaveThread::stopSaving(), and taskHasFinished().
◆ thumbnailLoaded()
| void Digikam::LoadSaveThread::thumbnailLoaded |
( |
const LoadingDescription & |
loadingDescription, |
|
|
const QImage & |
img |
|
) |
| |
|
overridevirtual |
◆ wait [1/2]
| void Digikam::DynamicThread::wait |
( |
| ) |
|
|
slotinherited |
◆ wait() [2/2]
| void Digikam::DynamicThread::wait |
( |
QMutexLocker & |
locker | ) |
|
|
protectedinherited |
◆ m_currentTask
◆ m_mutex
| QMutex Digikam::LoadSaveThread::m_mutex |
|
protected |
◆ m_notificationPolicy
◆ m_todo
Referenced by load(), Digikam::ManagedLoadSaveThread::load(), Digikam::ManagedLoadSaveThread::loadThumbnail(), Digikam::ManagedLoadSaveThread::preloadThumbnail(), Digikam::ManagedLoadSaveThread::preloadThumbnailGroup(), Digikam::ManagedLoadSaveThread::prependThumbnailGroup(), run(), save(), Digikam::ManagedLoadSaveThread::save(), Digikam::ManagedLoadSaveThread::stopAllTasks(), and Digikam::ManagedLoadSaveThread::stopSaving().
The documentation for this class was generated from the following files:
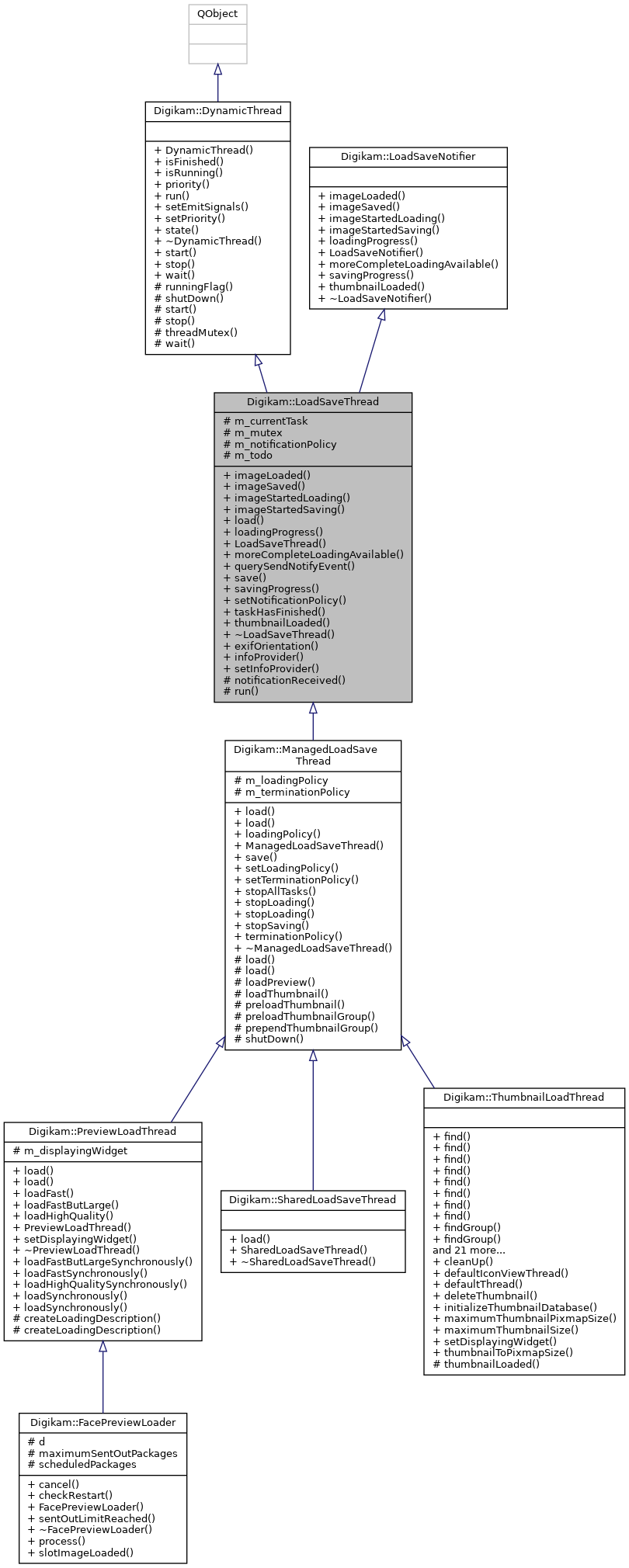
 Inheritance diagram for Digikam::LoadSaveThread:
Inheritance diagram for Digikam::LoadSaveThread: